Ship ahoy, crew goodbye!
What are the advantages of autonomous boats and ships?
“At the moment, the entire transportation sector is in a state of major transformation. Waterborne transportation systems can make an important contribution to solving our current transportation problems because waterways, particularly inland waterways, are the only modes of transportation that still have unused capacities these days. This offers plenty of potential for reducing the volume of traffic especially on roads. Waterways are currently used only to a small extent because barges as a mode of transportation are, at least in large part, unattractive for hauling goods.”

How can technologies of autonomous operation add attractiveness?
“There are several areas in this context. Inland navigation in Germany and Europe has a huge problem recruiting junior personnel and the average age of current personnel is very high. In addition, regulations require two people to be on board at all times. On larger ships even more. So, if you want to serve waterways on which only small units with a length of 40 meters (131 feet) or less are deployed, that’s simply no longer possible today because the costs are prohibitive. Deployment of autonomous boats (see examples below) would be a viable solution. They would not require personnel and be suitable for 24/7 service. Another benefit of 24/7 service of the ships would be the opportunity to maximize the efficiency of their energy consumption in this way. For instance, a ship traveling at slow speed is more energy-efficient than a faster ship. By means of digital monitoring, the ships could be controlled in a way that they wouldn’t have to wait in front of locks or ship lifts, for example.”
Your A-SWARM research project is heading precisely in that direction …
“Exactly. Today, barges are used for bulk shipping on large rivers like the Rhine. However, ships have progressively disappeared from all the adjacent areas. That’s why we – as well as other companies – are developing small autonomous boats particularly for serving cities and a wide variety of potential uses. At night, for instance, they could be hauling parcels to distribution hubs from where cargo bikes or electric vans would take over delivery on the last mile. This could avoid numerous on-road hauls. Autonomous boats could also be used for garbage disposal or for hauling food. Actually, there are no limits in this area and that opens up new fields to inland waterway transportation that cannot be served at the moment.”
What are the greatest challenges to the development of such autonomous boats?
“Developing autonomous boats for inland navigation poses a greater challenge than it does for maritime navigation to begin with. Partially automated ships are already sailing the oceans today with autopilots or collision warning systems performing important roles. These vessels still have crews for monitoring the operation but, theoretically speaking, the ship could sail largely on its own after having left one port and up until arriving at the next one. By contrast, more complex things are still in development, in other words: what happens in case of an encounter with another vessel or in the event of an accident or damage? Inland navigation poses additional challenges. The navigable waterways are relatively narrow, there are bridges and locks and, above all, traffic density is much higher. All that makes very special demands on automated systems.”
How do these systems work?
“In the A-SWARM project, we divided navigation into two areas. First, there’s so-called far-field navigation using GPS, which already enables very precise navigation. The second area is so-called near-field navigation using radar and lidar system sensors for monitoring the immediate environment of the boats. The objective of our development is to extend near-field navigation to a level that includes positioning capability. This would put an end to reliance on GPS because GPS is exposed to external effects such as spoofing and jamming, in other words to local distortions or interferences preventing the precise determination of a location. Consequently, autonomous systems will always require plausibility checks to verify the truth of data received. By the way, the AI computing operations performed in near-field navigation are highly suitable as a testbed for autonomous road traffic.”
Aside from the technical challenges legal prerequisites have to be met for the utilization of autonomous boats. How is this area going to evolve?
“Like in the case of self-driving cars, a lot of obstacles and hurdles have to be overcome on water as well, not just of a technical nature but also of an administrative and legal one. At the moment, for instance, it’s not possible at all to use a watercraft that doesn’t have a shipmaster. Authorities in Germany and the EU are working on that, but there’s a wealth of issues affected by this. Basically, for instance: who is responsible and who is liable? Authorities are currently in the process of sifting through laws and regulations, which often contain hundreds of pages and countless sections, in search for areas that might be affected by autonomous shipping. Every shipmaster, for instance, is legally obligated to assist another ship in an emergency or when someone has gone overboard. The question is: what kind of future provisions can be made for this in the case of autonomous ships? However, the administrative side will resolve the required issues, while the technical side definitely poses the bigger challenge.”

If you were to venture a look at the future, when might autonomous ships actually be used in regular service for hauling goods in big cities?
“That’s hard to say. Initial tests are already being run in ferry service or in maritime navigation around the world. But as I said before: inland navigation on variable and more challenging routes is clearly more complex. Things will probably take more time in this area. At the moment, the boats we’re developing are on autonomy level 2. They’re equipped with a path guidance assistance system, in other words they steer, accelerate and brake autonomously. In the next stage, they’re supposed to recognize their surroundings, autonomously make decisions and perform evasion maneuvers, for example. This level 3 continues to require a possibility for manual intervention. The pursuit of full autonomy without any intervention options should also raise the question of whether or not such autonomy is really desired or if, for example, there should be a control center from which ships might be remote-controllable. Strictly from a technological perspective, a few more years will still pass before barges will be traveling autonomously from A to B or even determining their route themselves. I think that we’re probably going to need at least ten more years before they can be deployed by covering all the bases, not just in terms of technological maturity but also regarding the evolution of regulations and infrastructure.”
Examples of autonomous navigation projects
Climate researcher
The “Mayflower” is supposed to ring in a new era in marine research. The trimaran with a length of 15 meters (49 feet) gathers important ocean data to enhance the effectiveness of climate change research. Thanks to AI, the “Mayflower,” which is named after the famous 17th century English immigration ship, is intended to be sailing fully autonomously and without any scientists on board – which clearly enhances cost efficiency. “Most of the ocean data we do have is biased to where the commercial shipping routes are,” says Brett Phaneuf, the director of the Mayflower Autonomous Ship Project (MAS). “To explore the rest, we can’t afford, as a society, to keep building giant USD 50 million – USD 100 million research vessels. Even if we did, we’d never have enough. But at the same time, we can’t afford to ignore the growing need for ocean research.”

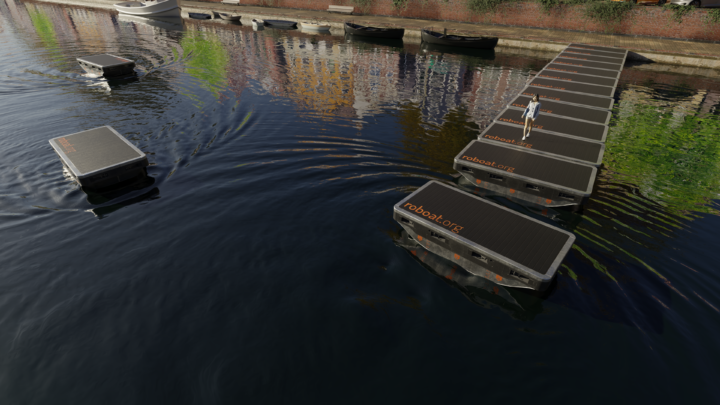
Multitalent
Amsterdam has an ambitious goal: By 2030, the entire transportation sector of the Dutch metropolis is supposed to be emission-free. Autonomous boats are an important component in the pursuit of this goal because Amsterdam has more than 80 kilometers (50 miles) of navigable waterways. The “roboat” that’s already being tested on the city’s canals is the central project in this endeavor. The electric “roboats” are planned to have versatile uses: Their lengths vary from 0.9 (3) to four meters (13 feet), depending on the version, and they can be used either as on-demand water taxis or as ferries with a fixed route, for garbage collection or for hauling goods, but also as temporary, modular bridges to decongest traffic during rush hour.


Pioneer
Buoyant mobility
Port of the future
With more than 36 million containers handled per year, the port of Singapore is the second-largest port in the world. To make it fit for the future, the city state’s port authority established the Maritime Innovation Lab (MIL) in 2019 that is dedicated to research of new technologies, among other things. Autonomous navigation is a key pillar for the future development of the port. Singapore is developing self-driving tugs, pilot boats and ferries some of which are already being tested. In addition, other ships are planned to be remote-controlled from the shore. Together with a digital traffic management system enhanced efficiency, higher safety and lower costs are to be achieved.