
Von Spielern und Helfern
Es wird wohl niemand intervenieren bei der Behauptung, dass Roboter nur deshalb existieren, weil Homo sapiens von Natur aus unterhaltungssüchtig und arbeitsscheu ist. Oder um es für uns freundlicher zu formulieren: nach maximaler Effizienz strebt. Die Bestätigung finden wir schon in der Sagenwelt. Zum Beispiel in der griechischen Mythologie: Dort soll der Gott Hephaistos sich Werkstattgehilfen und Wächter gebaut haben. Vulcanus, der römische Gott des Feuers, stellte gar Sklavenmädchen aus Gold her. In der jüdischen Literatur taucht der Golem auf. Ein mit Lehm und Buchstabenmystik zum Leben erweckter Gigant, der seinem Erschaffer dient und ihn beschützt, ohne aber selbstständig handeln oder sprechen zu können.
Der Drang des Menschen, ein künstliches Abbild seiner selbst als nützliche Arbeitskraft zu erschaffen, ist also verblüffend alt. Die ersten echten Automaten waren allerdings weitaus weniger universell einsetzbare Helfer. Als erste bekannte mechanisch arbeitende und einem Humanoiden ähnliche Figur gilt die singende und tanzende Puppe des Yan Chi aus Holz und Leder im 10. Jahrhundert vor Christi Geburt. Zeitgenössischen Schriften zufolge muss sie sehr echt gewirkt haben: „Der König starrte die Gestalt erstaunt an. Sie ging mit schnellen Schritten und bewegte ihren Kopf auf und ab, sodass jeder sie für einen lebenden Menschen gehalten hätte.“
Aristoteles (384–322 v. Chr.) dachte wie immer weiter – er glaubte, dass Automaten die Sklaverei abschaffen könnten: „Wenn jedes Werkzeug auf Geheiß, oder auch vorausahnend, das ihm zukommende Werk verrichten könnte, so bedürfte es weder für den Werkmeister der Gehilfen noch für die Herren der Sklaven.“
Zumindest einen kleinen Schritt in diese Richtung ging auch Philon von Byzanz im 3. Jahrhundert vor Christus mit seinem „automatischen Dienstmädchen“. Die mechanische Dame konnte, gesteuert mit Druck, Unterdruck und Gewichtsveränderung, einen Wein/Wasser-Mix einschenken. 60 n. Chr. soll verschiedenen Quellen zufolge Heron von Alexandria den ersten programmierbaren Roboter erschaffen haben. Der Ingenieur und Autor zahlreicher antiker Innovations-Fibeln wie Dioptra, Pneumatika oder Automata, konstruiert zur Unterhaltung des Publikums im Amphitheater einen Wagen mit einem Sandmotor als Antriebskraft. Führerlos konnte das Fahrzeug die Richtung ändern und sich entlang eines vorprogrammierten Parcours bewegen. Dieser primitive Mechanismus ist einer modernen binären Computersprache sehr ähnlich; altmodische Lochkarten funktionierten nach genau dem gleichen Prinzip. Ein mechanisches Kabinettstückchen ist auch das von Philon von Byzanz ersonnene und von Heron weiterentwickelte vollautomatisch vorgetragene Theaterstück. Spielzeit der antiken und binär gesteuerten Animation: immerhin fast zehn Minuten.
Echte frühe Robotik findet sich aber erst bei dem arabischen Ingenieur al-Dschazarī im 12. Jahrhundert n. Chr. Er entwarf humanoide und programmierbare Automaten. Möglicherweise ließ sich Leonardo da Vinci von diesem frühen Menschen 2.0 inspirieren: Er schuf mit der Zeichnung eines Ritterroboters den ersten geschichtlich belegten Humanoiden – der hätte theoretisch verschiedene Bewegungen ausführen können wie Kiefer bewegen, aufrichten und winken. Hilfreich dabei waren sicher da Vincis anatomische Studien des menschlichen Körpers.
Robotik-Timeline

1000 v. Chr.
Lass mal andere machen ... eine Idee, die schon in vielen altertümlichen Sagen und Mythologien in Form von künstlich erschaffenen Kreaturen aufgegriffen wird, die sich Götter unterstützend zur Seite stellen – so wie Roboter heute dem Menschen helfen. Hier ist eine Darstellung des Golem gezeigt, ein aus der jüdischen Mythologie stammender Koloss, der seinem Erschaffer mit gewaltigen Kräften dienen und ihn schützen soll.
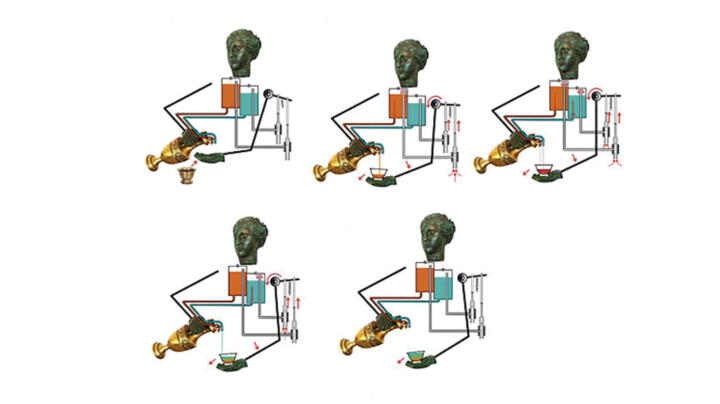
3. Jh. v. Chr.
Das „automatische Dienstmädchen“ des Philon von Byzanz konnte ein Wein/Wasser-Gemisch einschenken. Dazu musste man ihr einfach einen Becher in die freie Hand stellen. Dessen Gewicht setzte den Mechanismus in Betrieb. Wenn der Becher voll war, stoppte der Vorgang ebenfalls gewichtsgesteuert automatisch.

Um 1500
Das Universalgenie Leonardo da Vinci (1452–1519) entwarf Dutzende automatisch arbeitende Maschinen, darunter einen Ritterroboter. Diese Skizzen gelten als erster historischer Beleg eines Humanoiden. 2002 erweckte NASA-Roboterexperte Mark Rosheim da Vincis Entwurf anhand der Zeichnungen und mit Materialien aus damaliger Zeit zum Leben. Dieses Modell wurde bereits mehrfach ausgestellt.

1740
Jacques de Vaucanson (1709–1782) war ein französischer Ingenieur. Er träumte davon, einen möglichst akkurat funktionierenden künstlichen Menschen zu erschaffen. Es blieb ein Traum. Sein mechanischer Flötenspieler trug über eine mechanische Stiftwalze mit zwei Bewegungsrichtungen aber immerhin ein Repertoire von zwölf Liedern vor. Noch lebensechter war Vaucansons mechanische Ente mit mehr als 400 beweglichen Einzelteilen. Aber auch sie war letztlich eine Spielerei. Deutlich bahnbrechender war der weltweit erste vollautomatische Webstuhl, den der Franzose 1745 vorstellte.

1810
Der Trompeter des Dresdner Instrumentenbauers Friedrich Kaufmann (1785–1865) gilt als erster realer humanoider Roboter. Und er hatte menschlichen Trompetern sogar etwas voraus: Die Maschine konnte Doppelklänge von gleicher Stärke und hoher Reinheit erzeugen, oder, wie es ein Zeitgenosse schrieb, „von wahrhaft himmlischer Harmonie“.

1948
1948 In den Robotern Elmer und Elsie von William Gray Walter (1910–1977) steuerten licht- und berührungsempfindliche Sensoren wie Nervenzellen einen motorischen Antrieb. So konnten die schildkrötenähnlichen Maschinen tatsächlich ihren Weg um Hindernisse herum finden und gelten daher als erste elektronische autonome Roboter.

2014
Die japanische Firma Softbank präsentierte im Sommer 2014 Pepper, den nach eigenen Angaben ersten persönlichen, zu Emotionen fähigen Roboter der Welt. Heute sind weit über 10.000 der knopfäugigen Humanoiden weltweit im Einsatz. Die interaktiven Helfer sind auf dem Weg zum Massenprodukt.

2025
Die Bank of America schätzt in einem Bericht, dass die Zahl der humanoiden Roboter bis 2030 eine Million und bis 2060 drei Milliarden betragen wird. Auch die Motion Technology Company Schaeffler baut ihr Engagement im Bereich humanoider Roboter konsequent aus und begründet mit Neura Robotics, ein Hightech-Unternehmen im Bereich der kognitiven Robotik, eine zukunftsweisende Technologiepartnerschaft. Die Zusammenarbeit umfasst neben der Entwicklung auch die Lieferung von Schlüsselkomponenten für humanoide Roboter, wie innovative Aktoren. Außerdem wird Schaeffler Humanoide von Neura in seinem globalen Produktionsnetzwerk einsetzen und bis 2035 eine mittlere vierstellige Zahl an Humanoiden in seine Produktion integrieren.
Frankenstein lässt grüßen
Bei der Erschaffung künstlicher Menschen melden sich zu jener Zeit auch die Alchemisten zu Wort. Der Schweizer Naturforscher Paracelsus zum Beispiel beschrieb 1538, wie er einen „Homunculus“ erschafft: mit Pferdemist und Männersperma, welches man im Kolben erwärme, und zwar „auf 40 Tage oder so lang, bis er lebendig werde und sich beweg und rege …“. Bei guter Fütterung „wird ein recht lebendig menschlick kint daraus mit allen glitmaßen …“. Frankensteins Monster lässt grüßen – auch wenn das erst ab 1888 die Leser gruselte.
Weniger erschreckend, dafür umso realistischer geriet die Roboter-Ente des Spielzeugmeisters Jacques de Vaucanson im Jahr 1740. Die konnte mit den Flügeln schlagen, schnattern, Wasser trinken und nach Körnern picken und diese sogar über einen Gummidarm wieder ausscheiden. Als erster realer humanoider Roboter moderner Bauart gilt ein Soldat mit einer Trompete, der 1810 von Friedrich Kaufmann in Dresden hergestellt wurde. Auch er war eher von unterhaltsamem statt nützlichem Wert. Gleiches gilt für den japanischen Druckluft-Humanoiden Gakutensoku (1927) oder den mit E-Motoren und Magneten bewegten und ferngesteuerten Aluminiummann Eric (1928). 1939 betrat Elektro die Welt. Das Riesengerät (2,1 Meter hoch, 120 Kilo schwer) konnte sogar sprechen – 700 Worte, die von einem Plattenspieler kamen.
All diese Maschinen waren zwar mechanische Meisterstücke ihrer Zeit, aber von der in vielen Geschichten über die Jahrhunderte hinweg immer wieder auftauchenden Idee einer „klugen Maschine“ waren sie so weit weg wie der Schachroboter von Wolfgang von Kempelen anno 1783 – in Kempelens Wunderapparat steckte keine künstliche Intelligenz, sondern ein kleiner Mensch.
Von der Schildkröte zum Akkordarbeiter
Erst nach dem zweiten Weltkrieg erlebte die Robotik einen rasanten Aufstieg – einerseits durch Konrad Zuses ersten Computer im Jahr 1938, andrerseits durch die Erfindung des Transistors 1947. Die ersten elektronischen autonomen Roboter mit komplexem Verhalten baute William Gray Walter ab 1948. Seine Geschöpfe Elmer und Elsie waren allerdings so langsam, dass sie als „Schildkröten“ bekannt wurden.
Die heute typischen Knickarmroboter in der Industrie basieren alle auf Erfindungen von George Devol und Joseph Engelberger. Sie entwickelten und bauten 1954 mit Unimate den ersten elektronischen Industrieroboter. Laut Engelberger waren Servomechanismen, binäre Logik und Festkörperphysik die wichtigsten Werkzeuge für die Entwicklung von Robotern nach dem Zweiten Weltkrieg. Unimate landete übrigens 1961 – als erster Industrieroboter weltweit – bei GM im Werk Trenton in der Fertigung, um heiße Metallteile von einer Druckgussmaschine zu heben und zu stapeln.
Von nun an ging es schnell: Die ersten hydraulisch bewegten Roboter tauchten 1960 auf. Das Stanford Research Institute stellte 1970 den ersten autonomen mobilen Roboter Shakey auf die Beine. Der „Zittrige“ konnte durch Bildverarbeitung sogar selbstständig navigieren. Japanische Forscher begannen 1973 an der Waeda-Uni in Tokio mit der Entwicklung ihres humanoiden Roboters Wabot 1. Der deutsche Roboterpionier KUKA baute mit Famulus den weltweit ersten Industrieroboter mit sechs elektromechanisch angetriebenen Achsen. 1974 stellte die schwedische Firma Asea den ersten vollständig elektrisch angetriebenen Roboter IRb6 vor – erstmals programmiert dank Mikrocomputer. 1984 spielte Wabot 2 groß auf – der Roboter konnte dank zehn Fingern und zwei Füßen Orgel spielen, Musik lesen und eine Person begleiten.
Autobauer Honda widmete sich ab 1986 dem Roboterbau. 2004 gipfelte die Forschung im humanoiden Roboter Asimo, der als erster Roboter den menschlichen Gang kopierte. Überhaupt liebt Japan Humanoide. 2014 kam der „emotionale Roboter“ Pepper auf den Markt und wurde seitdem über 10.000-mal verkauft. Längst ist es in Japan selbstverständlich, dass die elektromechanischen Abbilder echte Menschen in Kaufhäusern und Hotels begrüßen und bedienen. Auch in der Krankenpflege sind humanoide Roboter etabliert. Andere Länder folgen dem Trend aus Japan. Rund um den Globus gehen Humanoide mit dem Menschen auf Tuchfühlung – und machen dabei auch auf emotionaler Ebene gewaltige Entwicklungsschritte.
Roboter produzieren sich selbst
Eine entscheidende Schwelle der Roboter-Evolution ist erreicht, wenn sich die Maschinen selbst entwickeln und bauen. Längst sind sie auf dem Weg dorthin. Schon im Jahr 2006 enthüllte die Cornell University ihren Starfish, einen vierbeinigen Roboter, der sich selbst modellieren konnte und sich nach einem Schaden das Gehen neu lehrte. Mit wachsender Intelligenz beschleunigt sich diese Entwicklung, die von vielen als Dystopie empfunden wird. In diesem Zusammenhang rücken Bereiche wie Robotikrecht und Robotikethik immer mehr in den Vordergrund.
Die Zeit drängt, sich mit solchen Themen zu befassen, denn schon heute sind Roboter aus unserer Welt nicht mehr wegzudenken. Neben Industrierobotern kommen Jahr für Jahr Millionen von Servicerobotern hinzu, die Rasen mähen, Staub saugen, Alte pflegen oder, oder, oder. 2016 erbaute der Maurer-Roboter Hadrian X in zwei Tagen sogar ein ganzes Einfamilienhaus. Stein auf Stein, frei nach Aristoteles: „Wenn jedes Werkzeug auf Geheiß, oder auch vorausahnend, das ihm zukommende Werk verrichten könnte ...“
Spielerisches Ziel von Forschern ist es übrigens, bis 2050 eine Fußballmannschaft aus autonomen zweibeinigen Robotern zu entwickeln, die gegen den Fußball-Weltmeister antreten kann. Handfester ist die Perfektionierung des menschlichen Körpers zum Beispiel durch mechanische Teile oder hochauflösende Sensorik, mit den Zielen, schneller zu gehen, höher zu springen, besser zu hören, besser zu sehen. Das gipfelt in Ideen, dass robotisch erweiterte menschliche Körper den Post-Menschen darstellen. Der dann vielleicht sogar das Weltall besiedeln kann. So weit hat selbst der visionäre Aristoteles nicht gedacht.


